
Yongjun Cho
A Senior Research Scientist at WoRV (World model for Robotics and Vehicle control) team of Maum AI, I have 3 years and 7 months of experience in the AI startup industry. I completed a master's program at the School of Electrical Engineering of Korea Advanced Institute of Science and Technology (KAIST) advised by Dong Eui Chang, specializing in Artificial Intelligence and Reinforcement Learning.
My research focuses on achieving generalization performance in robotics and AI by leveraging imitation learning, reinforcement learning, and vision-language models. I believe that large-scale physical interaction data is crucial to solving this challenge, ultimately aiming to make AI a companion to humans through an 'open-source Physical AI ecosystem' that learns physical laws and gathers extensive object interaction data to overcome both generalization and hardware limitations.
Research Interest: Robotics, Autonomous Navigation, Imitation Learning, Reinforcement Learning, Vision-Language-Action Models, Generalization in AI
✉️ cyjun0304@naver.com
News
Publications
[2]Daeseok Lee†, Yongjun Cho†
Fine-tuning Pocket-conditioned 3D Molecule Generation via Reinforcement Learning
ICLR 2024 Workshop on Generative and Experimental Perspectives for Biomolecular Design (GEM)
[3]Yongjun Cho†, Jae-Hyeon Park†, Jaesoon Choi, , Dong Eui Chang*
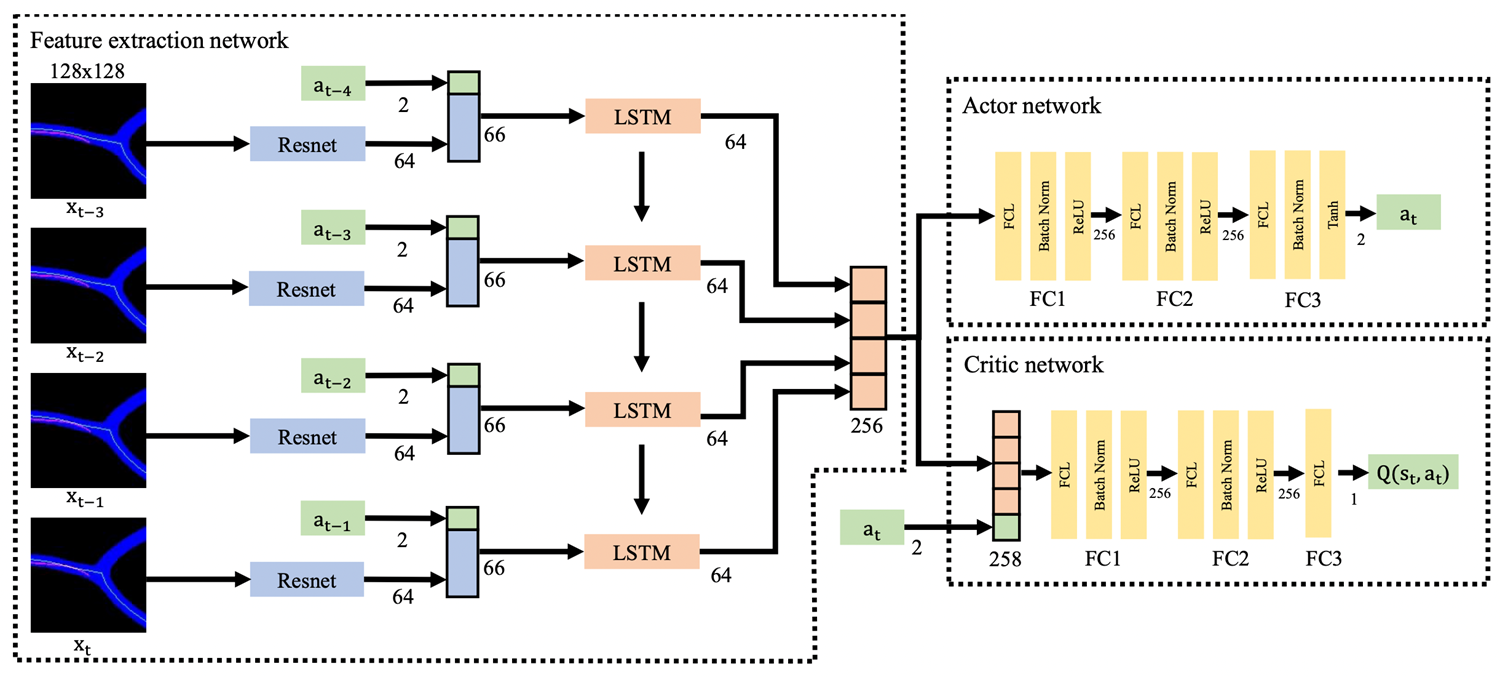
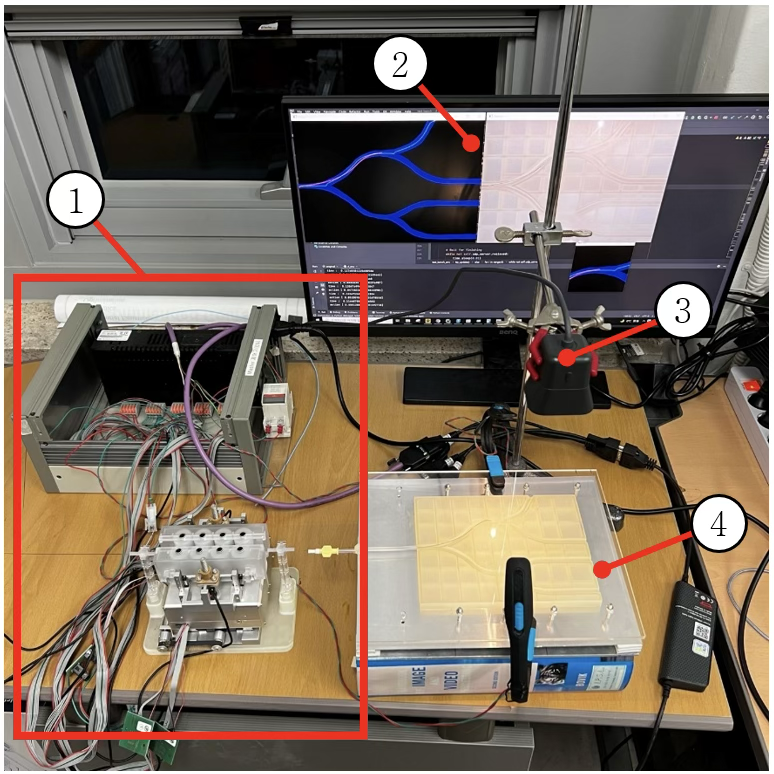
Sim-to-Real Transfer of Image-Based Autonomous Guidewire Navigation Trained by Deep Deterministic Policy Gradient with Behavior Cloning for Fast Learning
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
[4]Yongjun Cho, Jae-Hyeon Park, Jaesoon Choi, , Dong Eui Chang*
Image Processing Based Autonomous Guidewire Navigation in Percutaneous Coronary Intervention
2021 IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia)
[5]Jae-Hyeon Park, Yongjun Cho, Jin-Yeong Jeong, , Dong Eui Chang*
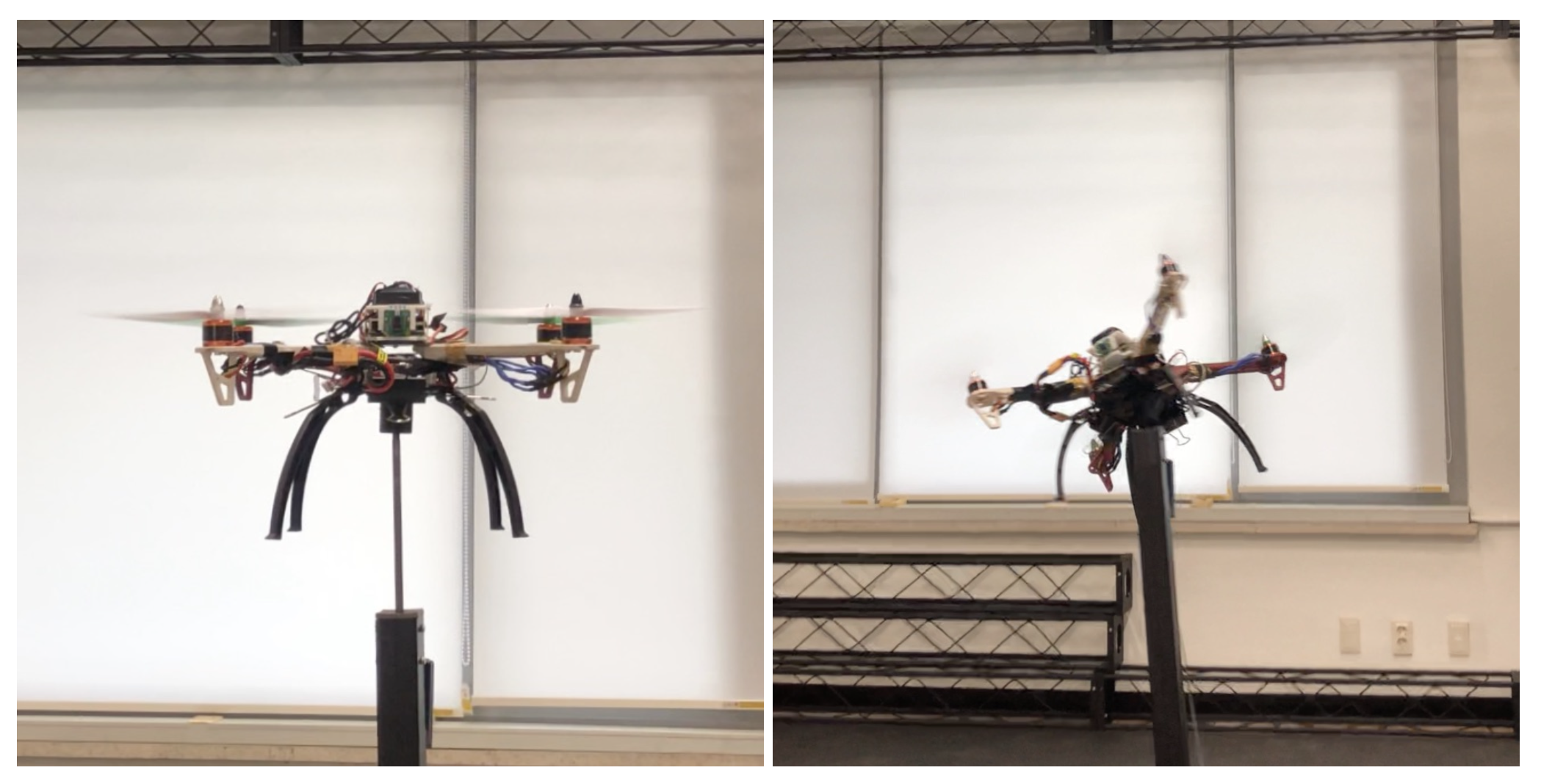
Real-time Quadrotor Actuator Fault Detection and Isolation Using Multivariate Statistical Analysis Techniques with Sensor Measurements
2020 20th International Conference on Control, Automation and Systems (ICCAS)
Experience
Senior Research Scientist @ Maum AI
Seongnam, S.Korea · Nov. 2024 - Present
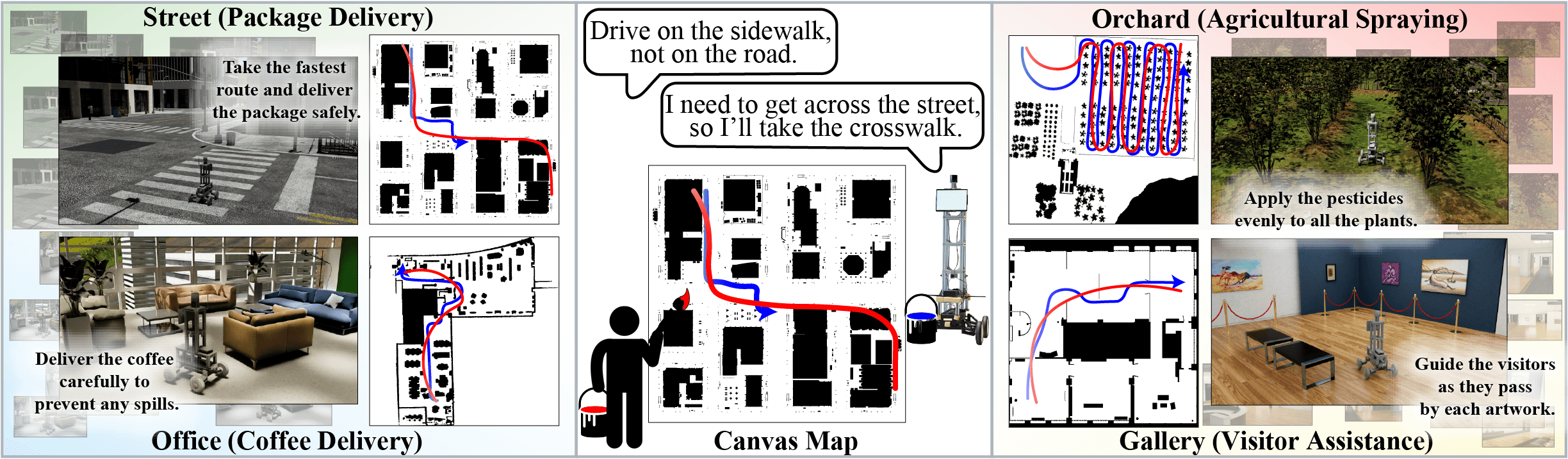
- Leveraged 12 H100 nodes and 400 hours of human expert data for training, and led its application to an orchard pesticide spraying robot for commercialization.
- Conducted research to improve Sim2Real performance and developed the data pipeline and inference infrastructure necessary for actual commercialization.
- Developed a pipeline for collecting human intervention data, achieving 97% evaluation performance.
Machine Learning Researcher @ Maum AI
Seongnam, S.Korea · May 2024 - Oct. 2024
- Initiated research and laid the fundamental conceptual framework for a general-purpose foundation model in robotics and autonomous driving.
- Designed and implemented evaluation tasks within Nvidia Isaac simulation environments, which were subsequently validated through real-world application.
- Developed and optimized the entire pipeline for large-scale data collection, efficient model training, and comprehensive evaluation.
Machine Learning Researcher @ Deargen Inc.
Seoul, S.Korea · Apr. 2022 - Apr. 2024
- Developed the overall Drug Target Interaction (DTI) model architecture and conducted data crawling and processing.
- Created a fine-tuning framework and provided services to an international big pharma corporation.
- Developed a reinforcement learning model to enhance pocket-conditioned 3D molecule generation.
Education
M.S. in Electrical Engineering
KAIST (Korea Advanced Institute of Science and Technology) · Daejeon, S.Korea · Mar. 2020 - Mar. 2022
- Advisor: Dong Eui Chang.
- Conducted research on reinforcement learning and autonomous driving for drones in the Control Lab.
B.S. in Mechanical Engineering
KAIST (Korea Advanced Institute of Science and Technology) · Daejeon, S.Korea · Mar. 2015 - Mar. 2020
- Developed an autonomous driving robot for library inventory management as a graduation project.
Honors & Awards
Outstanding Paper Awards
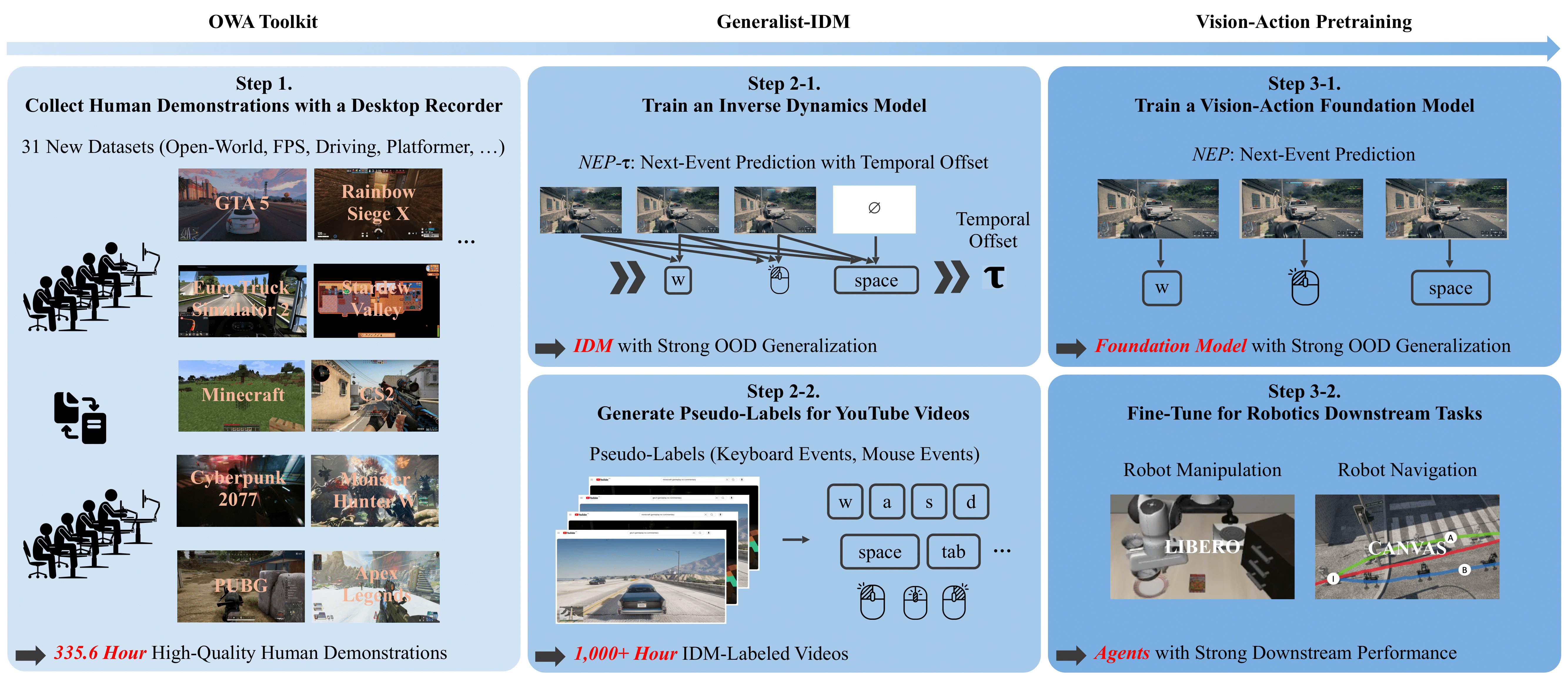
NeurIPS 2024 Workshop Open-World Agents
Vancouver, Canada
International
2024
Grand Prize
Autonomous Drone Competition hosted by the Defense Acquisition Program Administration
Daejeon, S.Korea
Domestic
2020
National Excellence Scholarship (Natural Sciences and Engineering)
Covers admission fee, full tuition, and additional support for study grant and living expenses
Korea Student Aid Foundation (KOSAF)
Scholarship
2015 - 2018